В каком случае сохраняется импульс системы. Школьная энциклопедия
ВВЕДЕНИЕ
Данное учебное пособие имеет целью оказать учащимся помощь в систематизации, обобщении и углублении знаний по физике, освоении методов и приемов решения задач при подготовке к итоговой аттестации.
Данное пособие включает:
· перечень рассматриваемых вопросов;
· систематизированное изложение основного теоретического материала (ориентирует учащихся на усвоение понятий, законов, закономерностей и т.д.);
· вопросы и задания для самоконтроля (они подобраны и сформулированы так, чтобы учащиеся могли проверить уровень своих знаний и умений по теме; вопросы и задания постепенно усложняются, что требует от учащихся для ответа и решения глубокого понимания физических законов, явлений и процессов, привлечения знаний из различных разделов физики);
· методические рекомендации по решению задач (последовательность действий, которые необходимо выполнить при решении задач, - от анализа условия задачи (его краткой записи, выполнение рисунка, схемы, чертежа, поясняющих условие задачи) до анализа и оценки полученного ответа);
· примеры решения задач (на примере решения наиболее типовых задач демонстрируется процесс построения и использования алгоритма решения задач на основе методических рекомендаций).
В приложении приведены тест и вариант контрольной работы, которую учащиеся выполняют самостоятельно.
Роль законов сохранения в механике и в других разделах физики огромна. Во-первых, они позволяют сравнительно простым путем, не рассматривая действующие на тела силы, решать ряд практически важных задач. Законы сохранения позволяют по первоначальному состоянию системы, не зная подробностей взаимодействия тел, определить ее конечное состояние, например, зная скорости тел до взаимодействия, определить скорости этих тел после взаимодействия. Во-вторых, и это главное, открытые в механике законы сохранения играют в природе огромную роль, далеко выходящую за рамки самой механики. Даже в тех условиях, когда законы механики Ньютона применять нельзя, законы сохранения импульса, энергии и момента импульса не теряют значения. Они применимы как к телам обычных размеров, так и к космическим телам и элементарным частицам. Именно всеобщность законов сохранения, их применимость ко всем явлениям природы, а не только к механическим делает эти законы столь значительными.
ЗАКОНЫ СОХРАНЕНИЯ В МЕХАНИКЕ
Импульс тела. Импульс силы. Закон сохранения импульса. Реактивное движение. К. Э. Циолковский - основоположник учения о реактивном движении.
Механическая работа. Работа силы тяжести, силы упругости, силы трения. Мощность.
Механическая энергия. Кинетическая и потенциальная энергия. Потенциальная энергия тел при гравитационном взаимодействии. Потенциальная энергия упруго деформированного тела. Закон сохранения энергии в механике. Изменение энергии в незамкнутых системах. Закон сохранения и превращения энергии. Упругие и неупругие соударения тел.
Импульс тела
Импульсом тела (количеством движения) называется векторная физическая величина, равная произведению массы тела т на его скорость и направленная так же, как и скорость (рис. 1.1):
Рисунок 1.1 Импульс тела.
Единицей импульса тела в СИ является килограмм-метр на секунду
Пусть скорость тела под действием силы F изменяется за время Δt от v 0 до v. Согласно основному уравнению динамики
Учитывая, что
Произведение силы на время ее действия называется импульсом силы . Единицей импульса силы является ньютон-секунда (Н с).
Формула (1.2) выражает второй закон Ньютона, который может быть сформулирован следующим образом: изменение импульса тела равно им пульсу равнодействующей сил, действующих на данное тело.
Отсюда видно, что импульс тела изменяется под действием данной силы одинаково у тел любой массы, если только время действия сил одинаково .
Импульс тела, как и скорость, зависит от выбора системы отсчета. Ускорение движения тела одинаково во всех инерциальных системах отсчета. Следовательно, сила, а значит, согласно (1.2) и изменение импульса тела не зависит от выбора системы отсчета. В любой инерциальной системе отсчета изменение импульса тела одинаково.
Закон сохранения импульса
Рассмотрим систему трех тел (рис. 2.1).
На тела действуют внешние силы F 1 , F 2 , F 3 . Силы F l2 , F 21 ,F 13 ,F 31 , F 23 , F 32 - внутренние силы.

Рисунок 2.1. Система трех тел.
Запишем для каждого тела основное уравнение динамики:
Просуммировав эти уравнения и учитывая, что согласно третьему закону Ньютона
где - импульс системы тел.
Импульс системы тел равен геометрической сумме импульсов тел системы. Таким образом, импульс системы тел могут изменить только внешние силы. Если система замкнута, то
Равенство (2.1) выражает закон сохранения импульса (ЗСИ): импульс замкнутой системы тел сохраняется при любых взаимодействиях этих тел.
В случае незамкнутой системы ЗСИ используется, если:
а) геометрическая сумма внешних сил равна нулю;
б) проекция равнодействующей внешних сил на некоторое направление равна нулю, т.е. вдоль этого направления импульссистемы сохраняется;
в) время взаимодействия мало (выстрел, взрыв, удар и т.п.).
С помощью ЗСИ можно вычислять скорости тел, не зная значения сил, действующих на них. ЗСИ является всеобщим законом: он применим как к телам обычных размеров, так и к космическим телам и элементарным частицам.
Реактивное движение
Под реактивным движением понимают движение тела, возникающее при отделении от тела его части с некоторой относительно тела скоростью.
При этом появляется так называемая реактивная сила, толкающая тело в сторону, противоположную направлению движения отделяющейся от него части тела.
Реактивное движение совершает ракета (рис. 3.1). Основной частью реактивного двигателя является камера сгорания. В одной из ее стенок имеется отверстие - реактивное сопло, предназначенное для выхода газа, образующегося при сгорании топлива. Высокая температура и давление газа определяют большую скорость истечения его из сопла.
До работы двигателя импульс ракеты и горючего был равен нулю, следовательно, и после включения двигателей геометрическая сумма импульсов ракеты и истекающих газов равна нулю:
![]()
где m и - масса и скорость выбрасываемых газов, М и - масса и скорость ракеты.

Рисунок 3.1. Реактивное движение.
В проекции на ось Оу:
Скорость ракеты.
Эта формула справедлива при условии небольшого изменения массы ракеты.
Конечная скорость ракеты находится в соответствии с формулой Циолковского:
![]() (3.1)
(3.1)
Где – отношение начальной и конечной масс ракеты.
Из нее следует, что конечная скорость ракеты может превышать относительную скорость истечения газов. Следовательно, ракета может быть разогнана до больших скоростей, необходимых для космических полетов. Но это может быть достигнуто только путем расхода значительной массы топлива, составляющей большую долю первоначальной массы ракеты. Например, для достижения первой космической скорости υ=7,9·10 3 м/с при =3·10 3 м/с (скорости истечения газов при сгорании топлива бывают порядка 2–4км/с) стартовая масса одноступенчатой ракеты должна примерно в 14раз превышать конечную массу. Для достижения конечной скорости υ 2 =4 отношение М 0 /М должно быть равно 50.
Значительное снижение стартовой массы ракеты может быть достигнуто при использовании многоступенчатых ракет , когда ступени ракеты отделяются по мере выгорания топлива. Из процесса последующего разгона ракеты исключаются массы контейнеров, в которых находилось топливо, отработавшие двигатели, системы управления ит.д. Именно по пути создания экономичных многоступенчатых ракет развивается современное ракетостроение.
Главная особенность реактивного движения состоит в том, что ракета может как ускоряться, так и тормозиться и поворачиваться без какого-либо взаимодействия с другими телами в отличие от всех других транспортных средств.
По принципу реактивного движения передвигаются осьминоги, кальмары, каракатицы, медузы.
Большая заслуга в развитии теории реактивного движения принадлежит К. Э. Циолковскому. Он разработал теорию полета тела переменной массы (ракеты) в однородном поле тяготения и рассчитал запасы топлива, необходимые для преодоления силы земного притяжения, основы теории жидкостного реактивного двигателя, а также элементы его конструкции, теорию многоступенчатых ракет, причем предложил два варианта: параллельный (несколько реактивных двигателей работает одновременно) и последовательный (реактивные двигатели работают друг за другом). К. Э. Циолковский строго научно доказал возможность полета в космос с помощью ракет с жидкостным реактивным двигателем, предложил специальные траектории посадки космических аппаратов на Землю, выдвинул идею создания межпланетных орбитальных станций, предложил идею автоматического управления ракетой.
Труды К. Э. Циолковского явились теоретической базой для развития современной ракетной техники.
Механическая работа
Действие силы, связанное с перемещением тела, характеризуется механической работой.
Механическая работа - это скалярная физическая величина, которая характеризует процесс перемещения тела под действием силы и равна произведению модуля силы на модуль перемещения и на косинус угла между ними:
В СИ единицей работы является джоуль (Дж).
Здесь F = const и а = const на всем перемещении (рис. 4.1).

Рисунок 4.1. Работа при перемещении тела.
Работа - величина скалярная и может быть как положительной, так и отрицательной (рисунок 4.2).

Рисунок 4.2. Зависимость работы от направления действия силы.
В общем случае сила переменна, путь криволинеен, угол α изменяется произвольно. Тогда для определения работы нужно мысленно разбитьвсе перемещение на такие малые перемещения , на которых можно считать силу и угол неизменными, и найти элементарные работы по формуле
Работа на всем перемещении будет равна алгебраической сумме элементарных работ и тем точнее, чем меньше каждое перемещение и чем больше их число:
и в пределе при Δг→0

Работа силы F на всей траектории выражается интегралом, вычисляемым вдоль траектории, где 1 и 2 - радиус-векторы начальной и конечной точек траектории.
Для вычисления этого интеграла надо знать зависимость F(r) вдоль траектории. Для определения работы можно воспользоваться графическим методом (рис. 4.3, а, б, в).

Рисунок 4.3. Графический метод для определения работы.
На графике F x = f(x) работа на перемещении Δr х = Δx численно равна площади заштрихованной фигуры. Работу можно представить как произведение средней силы на перемещение:
А =
В частности, если сила изменяется линейно от F 1 до F 2 на данном перемещении, то ее среднее значение
![]()
![]()
Если к движущемуся телу приложено несколько сил, то каждая из них совершает работу, а общая работа равна алгебраической сумме работ, совершаемых отдельными силами.
Работа силы тяжести
Пусть тело перемещается вертикально вниз из положения 1 в положение 2, определяемые соответственно высотами h 1 иh 2 над нулевым уровнем (рис. 5.1).

Рисунок 5.1. Работа силы тяжести.
Работа силы тяжести
При перемещении тела из положения 1 в положение 2 по траектории 1-3-2 работа силы тяжести
А = А 13 + А 32 .
A l 3 = mgΔr 1 cosα, A 32 = mgΔr 2 cos90° = 0.
Из рисунка 5.1 видно, что
Δr 1 cosα=h 1 -h 2 =>A=mg(h l ~h 2).
Это значит, что работа силы тяжести не зависит от формы траектории движения тела, а зависит только от перемещения центра тяжести тела по вертикали. На замкнутой траектории работа силы тяжести равна нулю.
Силы, работа которых не зависит от формы траектории, а на замкнутой траектории равна нулю, называются консервативными. Следовательно, сила тяжести - консервативная сила.
Работа силы упругости
Пусть тело, прикрепленное к пружине и находящееся на гладком стержне, перемещается из положения 1 в положение 2 (рис. 6.1).

Рисунок 6.1. Движение тела на пружине.
Сила упругости, действующая на тело со стороны деформированной пружины, не остается постоянной, а изменяется согласно закону Гука пропорционально абсолютному удлинению:
F 1 =kx 1 и F 2 = kx 2 .
Найдем работу силы упругости на этом перемещении по формуле
Более строгий вывод формулы для расчета работы силы упругости можно сделать, использовав метод интегрирования:
Можно показать, что работа силы упругости не зависит от формы траектории и на замкнутой траектории равна нулю. Она зависит только от взаимного положения частей тела. Сила упругости тоже консервативная сила.
Работа силы трения
Так как сила трения направлена противоположно перемещению (рис. 7.1), то работа силы трения будет
А тр = F TP Δг cos 180° = -F TP Δr.

Рисунок 7.1. Сила трения направлена противоположно движению тела.
Пусть тело перемещается из точки 1 в точку 2 по разным траекториям. Так как модули перемещений Δг 1 и (Δг 2 + Δг 3) неодинаковы (рис. 7.2), то сила трения совершает разные работы.

Рисунок 7.2. Перемещение тела по разным траекториям.
Таким образом, в отличие от силы тяжести и силы упругости работа силы трения зависит от формы траектории, по которой движется тело, и на замкнутой траектории не равна нулю. Работа силы трения необратимо превращает механическое движение тела в тепловое движение атомов и молекул.
Мощность
Различные машины и механизмы, выполняющие одинаковую работу, могут отличаться мощностью. Мощность характеризует быстроту совершения работы. Очевидно, что чем меньшее время требуется для выполнения данной работы, тем эффективнее работает машина, механизм и др.
При движении любого тела на него в общем случае действует несколько сил. Каждая сила совершает работу, и, следовательно, для каждой силы мы можем вычислить мощность.
Средняя мощность силы - скалярная физическая величина N, равная отношению работы А, совершаемой силой, к промежутку времени Δt, в течение которого она совершается:
В СИ единицей мощности является ватт (Вт).
Если тело движется прямолинейно и на него действует постоянная сила, то она совершает работу А = FΔrcosα. Поэтому мощность этой силы
где - проекция силы на направление движения.
По этой формуле можно рассчитывать и среднюю, и мгновенную мощности, подставляя значения средней или мгновенной скорости.
Мгновенная мощность - это мощность силы в данный момент времени.
![]()
Любой двигатель или механизм предназначены для выполнения определенной механической работы, которую называют полезной работой А п. Но любой машине приходится совершать большую работу, так как вследствие действия сил трения часть подводимой к машине энергии не может быть преобразована в механическую работу. Поэтому эффективность работы машины характеризуют коэффициентом полезного действия (КПД).
Коэффициент полезного действия η - это отношение полезной работы Ап, совершенной машиной, ко всей затраченной работе А 3 (подведенной энергии W):
![]()
где N n , N 3 - полезная и затраченная мощности соответственно.
КПД обычно выражают в процентах.
Механическая энергия
Механическое состояние тела (системы тел) определяется его положением относительно других тел (координатами) и его скоростью.
Если изменяется хотя бы одна из этих величин, то говорят об изменении механического состояния тела.
Состояние данной системы тел обязательно изменяется, если внешние силы совершают отличную от нуля работу.
Количественно механическое состояние системы и его изменение характеризуется механической энергией W.
Механическая энергия - это физическая величина, являющаяся функцией состояния системы и характеризующая способность системы совершать работу.
Изменение механической энергии ΔW равно работе приложенных к системе внешних сил:
Значение энергии системы в данном состоянии не зависит от пути перехода ее в это состояние.
Кинетическая энергия
Найдем, как энергия тел зависит от их скорости.
Пусть на тело массой m действуетсила F (это может быть одна сила или равнодействующая нескольких сил), направленная вдоль перемещения, и скорость тела изменяется от до (рис. 10.1).

Рисунок 10.1. Движение тела под действием силы.
Работа этой силы A = FΔr.
По второму закону Ньютона F = ma.
При равноускоренном движении
Следовательно,
![]()
Физическая величина
называется кинетической энергией.
Энергия, которой обладает тело вследствие своего движения, называется кинетической энергией .
A = W k 2 -W k 1 =A
теорема о кинетической энергии :
изменение кинетической энергии тела равно работе равнодействующей всех сил, действующих на тело.
Эта теорема справедлива независимо от того, какие силы действуют на тело: сила упругости, сила трения или сила тяжести.
![]()
Таким образом, кинетическая энергия тела равна работе, которую необходимо совершить, чтобы покоящемуся телу сообщить скорость.
Кинетическая энергия зависит от выбора системы отсчета.
©2015-2019 сайт
Все права принадлежать их авторам. Данный сайт не претендует на авторства, а предоставляет бесплатное использование.
Дата создания страницы: 2016-02-16
Изменяются, так как на каждое из тел действуют силы взаимодействия, однако сумма импульсов остается постоянной. Это и называется законом сохранения импульса .
Второй закон Ньютона выражается формулой . Ее можно записать иным способом, если вспомнить, что ускорение равно быстроте изменения скорости тела. Для равноускоренного движения формула будет иметь вид:
Если подставить это выражение в формулу, получим:
 ,
,
Эту формулу можно переписать в виде:
![]()
В правой части этого равенства записано изменение произведения массы тела на его скорость. Произведение массы тела на скорость является физической величиной, которая называется импульсом тела или количеством движения тела .
Импульсом тела называют произведение массы тела на его скорость. Это векторная величина. Направление вектора импульса совпадает с направлением вектора скорости.
Другими словами, тело массой m , движущееся со скоростью обладает импульсом . За единицу импульса в СИ принят импульс тела массой 1 кг , движущегося со скоростью 1 м/с (кг·м/с). При взаимодействии друг с другом двух тел если первое действует на второе тело силой , то, согласному третьему закону Ньютона , второе действует на первое силой . Обозначим массы этих двух тел через m 1 и m 2 , а их скорости относительно какой-либо системы отсчета через и . Через некоторое время t в результате взаимодействия тел их скорости изменятся и станут равными и . Подставив эти значения в формулу, получим:
![]() ,
,
![]() ,
,
Следовательно,
Изменим знаки обеих частей равенства на противоположные и запишем в виде
В левой части равенства - сумма начальных импульсов двух тел, в правой части - сумма импульсов тех же тел через время t . Суммы равны между собой. Таким образом, несмотря на то. что импульс каждого тела при взаимодействии изменяется, полный импульс (сумма импульсов обоих тел) остается неизменным.
Действителен и тогда, когда взаимодействуют несколько тел. Однако, важно, чтобы эти тела взаимодействовали только друг с другом и на них не действовали силы со стороны других тел, не входящих в систему (либо чтоб внешние силы уравновешивались). Группа тел, не взаимодействущая с другими телами, называется замкнутой системой справедлив только для замкнутых систем.
Импульс тела – это векторная физическая величина, равная произведению массы тела на его скорость:
Обозначение – \(p \) , единицы измерения – (кг·м)/с .
Импульс тела – это количественная мера движения тела.
Направление импульса тела всегда совпадает с направлением скорости его движения.
Изменение импульса тела равно разности конечного и начального значений импульса тела:
![]()
где \(p_0 \)
– начальный импульс тела,
\(p \)
– конечный импульс тела.
Если на тело действует нескомпенсированная сила, то его импульс изменяется. При этом изменение импульса тела равно импульсу подействовавшей на него силы.
Импульс силы – это количественная мера изменения импульса тела, на которое подействовала эта сила.
Обозначение – \(F\!\Delta t \)
, единицы измерения - Н·с.
Импульс силы равен изменению импульса тела:
Направление импульса силы совпадает по направлению с изменением импульса тела.
Второй закон Ньютона (силовая форма):

Важно!
Следует всегда помнить, что совпадают направления векторов:
Силы и ускорения: \(\vec{F}\uparrow\uparrow\vec{a} \)
;
импульса тела и скорости: \(\vec{p}\uparrow\uparrow\vec{v} \)
;
изменения импульса тела и силы: \(\Delta\vec{p}\uparrow\uparrow\vec{F} \)
;
изменения импульса тела и ускорения: \(\Delta\vec{p}\uparrow\uparrow\vec{a} \)
.
Импульс системы тел
Импульс системы тел равен векторной сумме импульсов тел, составляющих эту систему:
При рассмотрении любой механической задачи мы интересуемся движением определенного числа тел. Совокупность тел, движение которых мы изучаем, называется механической системой или просто системой .
Рассмотрим систему, состоящую из трех тел. На тела системы действуют внешние силы, а между телами действуют внутренние силы.
\(F_1,F_2,F_3 \)
– внешние силы, действующие на тела;
\(F_{12}, F_{23}, F_{31}, F_{13}, F_{21}, F_{32} \)
– внутренние силы, действующие между телами.
Вследствие действия сил на тела системы их импульсы изменяются. Если за малый промежуток времени сила заметно не меняется, то для каждого тела системы можно записать изменение импульса в виде уравнения:

В левой части каждого уравнения стоит изменение импульса тела за малое время \(\Delta t \)
.
Обозначим: \(v_0 \)
– начальные скорости тел, а \(v^{\prime} \)
– конечные скорости тел.
Сложим левые и правые части уравнений.

Но силы взаимодействия любой пары тел в сумме дают нуль.

Важно!
Импульс системы тел могут изменить только внешние силы, причем изменение импульса системы пропорционально сумме внешних сил и совпадает с ней по направлению. Внутренние силы, изменяя импульсы отдельных тел системы, не изменяют суммарный импульс системы.
Закон сохранения импульса
Закон сохранения импульса
Векторная сумма импульсов тел, составляющих замкнутую систему, остается постоянной при любых взаимодействиях тел этой системы между собой:
Замкнутая система
– это система, на которую не действуют внешние силы.
Абсолютно упругий удар
– столкновение двух тел, в результате которого в обоих взаимодействующих телах не остается никаких деформаций.
При абсолютно упругом ударе взаимодействующие тела до и после взаимодействия движутся отдельно.
Закон сохранения импульса для абсолютно упругого удара:
Абсолютно неупругий удар – столкновение двух тел, в результате которого тела объединяются, двигаясь дальше как единое целое.
Закон сохранения импульса для абсолютно неупругого удара:
Реактивное движение
– это движение, которое происходит за счет отделения от тела с некоторой скоростью какой-то его части.
Принцип реактивного движения основан на том, что истекающие из реактивного двигателя газы получают импульс. Такой же по модулю импульс приобретает ракета.
Для осуществления реактивного движения не требуется взаимодействия тела с окружающей средой, поэтому реактивное движение позволяет телу двигаться в безвоздушном пространстве.
Реактивные двигатели
Широкое применение реактивные двигатели в настоящее время получили в связи с освоением космического пространства. Используются они также для метеорологических и военных ракет различного радиуса действия. Кроме того, все современные скоростные самолеты оснащены воздушно-ракетными двигателями.
Реактивные двигатели делятся на два класса:
- ракетные;
- воздушно-реактивные.
В ракетных двигателях топливо и необходимый для его горения окислитель находятся непосредственно внутри двигателя или в его топливных баках.
Ракетный двигатель на твердом топливе
При горении топлива образуются газы, имеющие очень высокую температуру и оказывающие давление на стенки камеры. Сила давления на переднюю стенку камеры больше, чем на заднюю, где находится сопло. Выходящие через сопло газы не встречают на своем пути стенку, на которую могли бы оказать давление. В результате появляется сила, толкающая ракету вперед.

Сопло – суженная часть камеры, служит для увеличения скорости истечения продуктов сгорания, что, в свою очередь, повышает реактивную силу. Сужение струи газа вызывает увеличение его скорости, так как при этом через меньшее поперечное сечение в единицу времени должна пройти такая же масса газа, что и при большем поперечном сечении.
Ракетный двигатель на жидком топливе

В ракетных двигателях на жидком топливе в качестве горючего используют керосин, бензин, спирт, жидкий водород и др., а в качестве окислителя – азотную кислоту, жидкий кислород, перекись водорода и пр.
Горючее и окислитель хранятся отдельно в специальных баках и с помощью насосов подаются в камеру сгорания, где температура достигает 3000 0С и давление до 50 атм. В остальном работает так же, как и двигатель на твердом топливе.
Воздушно-реактивный двигатель

В носовой части находится компрессор, засасывающий и сжижающий воздух, который затем поступает в камеру сгорания. Жидкое горючее (керосин) попадает в камеру сгорания с помощью специальных форсунок. Раскаленные газы выходят через сопло, вращают газовую турбину, приводящую в движение компрессор.
Основное отличие воздушно-реактивных двигателей от ракетных двигателей состоит в том, что окислителем для горения топлива служит кислород воздуха, поступающего внутрь двигателя из атмосферы.
Алгоритм применения закона сохранения импульса к решению задач:
- Запишите краткое условие задачи.
- Определите характер движения и взаимодействия тел.
- Сделайте рисунок, на котором укажите направление векторов скоростей тел до и после взаимодействия.
- Выберите инерциальную систему отсчета с удобным для нахождения проекций векторов направлением координатных осей.
- Запишите закон сохранения импульса в векторной форме.
- Спроецируйте его на выбранные координатные оси (сколько осей, столько и уравнений в системе).
- Решите полученную систему уравнений относительно неизвестных величин.
- Выполните действия единицами измерения величин.
- Запишите ответ.
Работа силы
Механическая работа – это скалярная векторная величина, равная произведению модулей вектора силы, действующей на тело, вектора перемещения и косинуса угла между этими векторами.
Обозначение – \(A \) , единицы измерения – Дж (Джоуль).

1 Дж – это работа, которую совершает сила в 1 Н на пути в 1 м:
![]()
Механическая работа совершается, если под действием некоторой силы, направленной не перпендикулярно, тело перемещается на некоторое расстояние.
Зависимость механической работы от угла \(\alpha \)
- \(\alpha=0^{\circ},\, \cos\alpha=1,\, A=FS,\,A>0; \)

- \(0^{\circ}<\alpha<90^{\circ},\, A=FS\cos\alpha,\,A>0; \)

- \(\alpha=90^{\circ},\, \cos\alpha=0,\, A=0; \)

- \(90^{\circ}<\alpha<180^{\circ},\, A=FS\cos\alpha,\,A<0; \)

\(\alpha=180^{\circ},\, \cos\alpha=-1,\, A=-FS,\,A<0; \)

Геометрический смысл механической работы
На графике зависимости \(F=F(S) \) работа силы численно равна площади фигуры, ограниченной графиком, осью перемещения и прямыми, параллельными оси силы.

Формулы для вычисления работы различных сил
Работа силы тяжести:

Работа силы упругости:

Коэффициент полезного действия механизма (КПД)
- это физическая величина, равная отношению полезной работы, совершенной механизмом, ко всей затраченной при этом работе.
Обозначение – \(\eta \)
, единицы измерения – %.

\(A_{\mathit{пол.}} \)
– полезная работа – это та работа, которую нужно сделать;
\(A_{\mathit{зат.}} \)
– затраченная работа – это та работа, что приходится делать на самом деле.
![]()
Важно!
КПД любого механизма не может быть больше 100%.
Мощность
Мощность – это количественная мера быстроты совершения работы.
Обозначение – \(N \)
, единицы измерения – Вт (Ватт).
Мощность равна отношению работы к времени, за которое она была совершена: .
1 Вт – это мощность, при которой за 1 с совершается работа в 1 Дж:
![]()
1 л. с. (лошадиная сила) = 735 Вт.
Связь между мощностью и скоростью равномерного движения:

Таким образом, мощность равна произведению модуля вектора силы на модуль вектора скорости и на косинус угла между направлениями этих векторов.
Важно!
Если интервал времени стремится к нулю, то выражение представляет собой мгновенную мощность, определяемую через мгновенную скорость.
Работа как мера изменения энергии
Если система тел может совершать работу, то она обладает энергией.
Работа и изменение кинетической энергии (теорема о кинетической энергии)


Если под действием силы тело совершило перемещение и вследствие этого его скорость изменилась, то работа силы равна изменению кинетической энергии.
Силы, работа которых не зависит от формы траектории, называются консервативными
.
Работа и изменение потенциальной энергии тела, поднятого над землей


Работа силы тяжести равна изменению потенциальной энергии, взятому с противоположным знаком.
Работа и изменение потенциальной энергии упруго деформированного тела



Работа силы упругости равна изменению потенциальной энергии, взятому с противоположным знаком.
Кинетическая энергия
Кинетическая энергия – это энергия, которой обладает тело вследствие своего движения.
Обозначение – \(W_k (E_k) \) , единицы измерения – Дж.
Кинетическая энергия равна половине произведения массы тела на квадрат его скорости:
Важно!
Так как кинетическая энергия отдельного тела определяется его массой и скоростью, то она не зависит от того, взаимодействует ли это тело с другими телами или нет. Значение кинетической энергии зависит от выбора системы отсчета, как и значение скорости. Кинетическая энергия системы тел равна сумме кинетических энергий отдельных тел, входящих в эту систему.
Потенциальная энергия
Потенциальная энергия – это энергия взаимодействия тел или частей одного и того же тела.
Обозначение – \(W_p (E_p) \) , единицы измерения – Дж.
Потенциальная энергия тела, поднятого на некоторую высоту над землей, равна произведению массы тела, ускорения свободного падения и высоты, на которой он находится:
Потенциальная энергия упруго деформированного тела равна половине произведения жесткости на квадрат удлинения:
Важно!
Величина потенциальной энергии зависит от выбора нулевого уровня. Нулевым называется уровень, на котором потенциальная энергия равна нулю. Нулевой уровень выбирается произвольно, исходя из удобства решения задачи.
Полная механическая энергия – это энергия, равная сумме кинетической и потенциальной энергий.
Обозначение – \(W (E) \) , единицы измерения – Дж.
Закон сохранения механической энергии
В замкнутой системе тел, между которыми действуют только консервативные силы, механическая энергия сохраняется, т. е. не изменяется с течением времени:

Если между телами системы действуют кроме сил тяготения и упругости другие силы, например сила трения или сопротивления, действие которых приводит к превращению механической энергии в тепловую, то в такой системе тел закон сохранения механической энергии не выполняется.
Важно!
В случае, если кроме консервативных сил (тяжести, упругости, тяготения) существуют еще и неконсервативные силы, например сила трения, а также внешние силы, то
Теорема о кинетической энергии справедлива для сил любой природы:

Если на систему тел действуют неконсервативные и внешние силы, то изменение полной энергии равно сумме работ неконсервативных и внешних сил.
Закон сохранения и превращения энергии
Энергия никогда не исчезает и не появляется вновь, она лишь превращается из одного вида в другой или передается от одного тела к другому.
Основные формулы по теме «Законы сохранения в механике»


Как мы уже говорили, в точности замкнутых систем тел не существует. Поэтому возникает вопрос: в каких случаях можно применять закон сохранения импульса к незамкнутым системам тел? Рассмотрим эти случаи.
1. Внешние силы уравновешивают друг друга или ими можно пренебречь
С этим случаем мы уже познакомились в предыдущем параграфе на примере двух взаимодействующих тележек.
В качестве второго примера вспомним первоклассника и десятиклассника, соревнующихся в перетягивании каната, стоя на скейтбордах (рис. 26.1). При этом внешние силы также уравновешивают друг друга, а силой трения можно пренебречь. Поэтому сумма импульсов соперников сохраняется.
Пусть в начальный момент школьники покоились. Тогда их суммарный импульс в начальный момент равен нулю. Согласно закону сохранения импульса он останется равным нулю и тогда, когда они будут двигаться. Следовательно,
где 1 и 2 – скорости школьников в произвольный момент (пока действия всех других тел компенсируются).
1. Докажите, что отношение модулей скоростей мальчиков обратно отношению их масс:
v 1 /v 2 = m 2 /m 1 . (2)
Обратите внимание: это соотношение будет выполняться независимо от того, как взаимодействуют соперники. Например, не имеет значения, тянут они канат рывками или плавно, перебирает канат руками только кто-то один из них или оба.
2. На рельсах стоит платформа массой 120 кг, а на ней – человек массой 60 кг (рис. 26.2, а). Трением между колесами платформы и рельсами можно пренебречь. Человек начинает идти вдоль платформы вправо со скоростью 1,2 м/с относительно платформы (рис. 26.2, б).

Начальный суммарный импульс платформы и человека равен нулю в системе отсчета, связанной с землей. Поэтому применим закон сохранения импульса в этой системе отсчета.
а) Чему равно отношение скорости человека к скорости платформы относительно земли?
б) Как связаны модули скорости человека относительно платформы, скорости человека относительно земли и скорости платформы относительно земли?
в) С какой скоростью и в каком направлении будет двигаться платформа относительно земли?
г) Чему будут равны скорости человека и платформы относительно земли, когда он дойдет до ее противоположного конца и остановится?
2. Проекция внешних сил на некоторую ось координат равна нулю
Пусть, например, по рельсам со скоростью катится тележка с песком массой m т. Будем считать, что трением между колесами тележки и рельсами можно пренебречь.
В тележку падает груз массой m г (рис. 26.3, а), и тележка катится далее с грузом (рис. 26.3, б). Обозначим конечную скорость тележки с грузом к.
Введем оси координат, как показано на рисунке. На тела действовали только вертикально направленные внешние силы (сила тяжести и сила нормальной реакции со стороны рельсов). Эти силы не могут изменить горизонтальные проекции импульсов тел. Поэтому проекция суммарного импульса тел на горизонтально направленную ось х осталась неизменной.
3. Докажите, что конечная скорость тележки с грузом
v к = v(m т /(m т + m г)).
Мы видим, что скорость тележки после падения груза уменьшилась.
Уменьшение скорости тележки объясняется тем, что часть своего начального горизонтально направленного импульса она передала грузу, разгоняя его до скорости к. Когда тележка разгоняла груз, он, согласно третьему закону Ньютона, тормозил тележку.
Обратите внимание на то, что в рассматриваемом процессе суммарный импульс тележки и груза не сохранялся. Неизменной осталась лишь проекция суммарного импульса тел на горизонтально направленную ось x.
Проекция же суммарного импульса тел на вертикально направленную ось у в данном процессе изменилась: перед падением груза она была отлична от нуля (груз двигался вниз), а после падения груза она стала равной нулю (оба тела движутся горизонтально).
4. В стоящую на рельсах тележку с песком массой 20 кг влетает груз массой 10 кг. Скорость груза непосредственно перед попаданием в тележку равна 6 м/с и направлена под углом 60º к горизонту (рис. 26.4). Трением между колесами тележки и рельсами можно пренебречь.
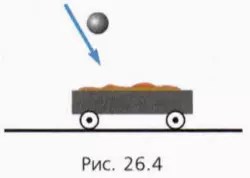
а) Какая проекция суммарного импульса в данном случае сохраняется?
б) Чему равна горизонтальная проекция импульса груза непосредственно перед его попаданием в тележку?
в) С какой скоростью будет двигаться тележка с грузом?
3. Удары, столкновения, разрывы, выстрелы
В этих случаях происходит значительное изменение скорости тел (а значит, и их импульса) за очень краткий промежуток времени. Как мы уже знаем (см. предыдущий параграф), это означает, что в течение этого промежутка времени тела действуют друг на друга с большими силами. Обычно эти силы намного превышают внешние силы, действующие на тела системы.
Поэтому систему тел во время таких взаимодействий можно с хорошей степенью точности считать замкнутой, благодаря чему можно использовать закон сохранения импульса.
Например, когда во время пушечного выстрела ядро движется внутри ствола пушки, силы, с которыми действуют друг на друга пушка и ядро, намного превышают горизонтально направленные внешние силы, действующие на эти тела.
5. Из пушки массой 200 кг выстрелили в горизонтальном направлении ядром массой 10 кг (рис. 26.5). Ядро вылетело из пушки со скоростью 200 м/с. Какова скорость пушки при отдаче?

При столкновениях тела также действуют друг на друга с довольно большими силами в течение краткого промежутка времени.
Наиболее простым для изучения является так называемое абсолютно неупругое столкновение (или абсолютно неупругий удар). Так называют столкновение тел, в результате которого они начинают двигаться как единое целое. Именно так взаимодействовали тележки в первом опыте (см. рис. 25.1), рассмотренном в предыдущем параграфе, Найти общую скорость тел после абсолютно неупругого столкновения довольно просто.
6. Два пластилиновых шарика массой m 1 и m 2 движутся со скоростями 1 и 2 . В результате столкновения они стали двигаться как единое целое. Докажите, что их общую скорость можно найти с помощью формулы
Обычно рассматривают случаи, когда тела до столкновения движутся вдоль одной прямой. Направим ось x вдоль этой прямой. Тогда в проекциях на эту ось формула (3) принимает вид
Направление общей скорости тел после абсолютно неупругого столкновения определяется знаком проекции v x .
7. Объясните, почему из формулы (4) следует, что скорость «объединенного тела» будет направлена так же, как начальная скорость тела с большим импульсом.
8. Две тележки движутся навстречу друг другу. При столкновении они сцепляются и движутся как единое целое. Обозначим массу и скорость тележки, которая вначале ехала вправо, m п и п, а массу и скорость тележки, которая вначале ехала влево, m л и л. В каком направлении и с какой скоростью будут двигаться сцепленные тележки, если:
а) m п = 1 кг, v п = 2 м/с, m л = 2 кг, v л = 0,5 м/с?
б) m п = 1 кг, v п = 2 м/с, m л = 4 кг, v л = 0,5 м/с?
в) m п = 1 кг, v п = 2 м/с, m л = 0,5 кг, v л = 6 м/с?

Дополнительные вопросы и задания
В заданиях к этому параграфу предполагается, что трением можно пренебречь (если не указан коэффициент трения).
9. На рельсах стоит тележка массой 100 кг. Бегущий вдоль рельсов школьник массой 50 кг с разбега запрыгнул на эту тележку, после чего она вместе со школьником стала двигаться со скоростью 2 м/с. Чему была равна скорость школьника непосредственно перед прыжком?
10. На рельсах недалеко друг от друга стоят две тележки массой M каждая. На первой из них стоит человек массой m. Человек перепрыгивает с первой тележки на вторую.
а) Скорость какой тележки будет больше?
б) Чему будет равно отношение скоростей тележек?
11. Из зенитного орудия, установленного на железнодорожной платформе, производят выстрел снарядом массой m под углом α к горизонту. Начальная скорость снаряда v0. Какую скорость приобретет платформа, если ее масса вместе с орудием равна M? В начальный момент платформа покоилась.
12. Скользящая по льду шайба массой 160 г ударяется о лежащую льдинку. После удара шайба скользит в прежнем направлении, но модуль ее скорости уменьшился вдвое. Скорость же льдинки стала равной начальной скорости шайбы. Чему равна масса льдинки?
13. На одном конце платформы длиной 10 м и массой 240 кг стоит человек массой 60 кг. Каково будет перемещение платформы относительно земли, когда человек перейдет к ее противоположному концу?
Подсказка. Примите, что человек идет с постоянной скоростью v относительно платформы; выразите через v скорость платформы относительно земли.
14. В лежащий на длинном столе деревянный брусок массой M попадает летящая горизонтально со скоростью и пуля массой m и застревает в нем. Сколько времени после этого брусок будет скользить по столу, если коэффициент трения между столом и бруском равен μ?
В результате взаимодействия тел их координаты и скорости могут непрерывно изменяться. Могут изменяться и силы, действующие между телами. К счастью, наряду с изменчивостью окружающего нас мира существует и неизменный фон, обусловленный так называемыми законами сохранения, утверждающими постоянство во времени некоторых физических величин, характеризующих систему взаимодействующих тел как целое.
Пусть
на тело массой m
в течение времени t
действует какая-то постоянная сила
.
Выясним, как произведение этой силы на
время её действия связано с изменением состояния этого
тела.
связано с изменением состояния этого
тела.
Закон сохранения импульса обязан своим существованием такому фундаментальному свойству симметрии, как однородность пространства .
Из второго закона Ньютона (2.8) мы видим, что временная характеристика действия силы связана с изменением импульса Fdt=dP
Импульсом тела P называют произведение массы тела на скорость его движения:
 (2.14)
(2.14)
Единица импульса - килограмм-метр в секунду (кг м/с).
Направлен импульс всегда в туже сторону, что и скорость.
В современной формулировки закон сохранения импульса гласит : при любых процессах, происходящих в замкнутой системе, её полный импульс остаётся неизменным.

Докажем справедливость этого закона. Рассмотрим движение двух материальных точек, взаимодействующих только между собой (рис. 2.4).
 Такую
систему можно назвать изолированной в
том смысле, что нет взаимодействия с
другими телами. По третьему закону
Ньютона, силы, действующие на эти тела,
равны по величине и противоположны по
направлению:
Такую
систему можно назвать изолированной в
том смысле, что нет взаимодействия с
другими телами. По третьему закону
Ньютона, силы, действующие на эти тела,
равны по величине и противоположны по
направлению:

Используя второй закон Ньютона, это можно выразить как:


Объединяя эти выражения, получим

Перепишем данное соотношение, используя понятие импульса:

Следовательно,


Если изменение какой-либо величины равно нулю, то эта физическая величина сохраняется. Таким образом, приходим к выводу: сумма импульсов двух взаимодействующих изолированных точек остается постоянной, независимо от вида взаимодействия между ними.
 (2.15)
(2.15)
Этот вывод можно обобщить на произвольную изолированную систему материальных точек, взаимодействующих между собой. Если система не замкнута, т.е. сумма внешних сил, действующих на систему, не равна нулю: F ≠ 0 , закон сохранения импульса не выполняется.
Центром масс (центром инерции) системы называют точку, координаты которой заданы уравнениями:

 (2.16)
(2.16)

где х 1 ; у 1 ; z 1 ; х 2 ; у 2 ; z 2 ; …; х N ; у N ; z N - координаты соответствующих материальных точек системы.
§2.5 Энергия. Механическая работа и мощность
Количественной мерой различных видов движения является энергия. При превращении одной формы движения в другую происходит изменение энергии. Точно также при передаче движения от одного тела к другому происходит уменьшение энергии одного тела и увеличение энергии другого тела. Такие переходы и превращения движения и, следовательно, энергии могут происходить либо в процессе работы, т.е. тогда, когда осуществляется перемещение тела при воздействии силы, либо в процессе теплообмена.
Для определения работы силы F рассмотрим криволинейную траекторию (рис. 2.5), по которой движется материальная точка из положения 1 в положение 2. Разобьем траекторию на элементарные, достаточно малые перемещения dr; этот вектор совпадает с направлением движения материаль ной точки. Модуль элементарного перемещения обозначим dS: |dr| = dS. Так как элементарное перемещение достаточно мало, то в этом случае силу F можно рассматривать неизменной и элементарную работу вычислять по формуле работы постоянной силы:
dA = F соsα dS = F соsα|dr|, (2.17)
или как скалярное произведение векторов:
 (2.18)
(2.18)
Э лементарная
работа
или
просто работа силы,
есть
скалярное произведение векторов силы
и элементарного перемещения.
лементарная
работа
или
просто работа силы,
есть
скалярное произведение векторов силы
и элементарного перемещения.
Суммируя все элементарные работы, можно определить работу переменной силы на участке траектории от точки 1 до точки 2 (см. рис. 2.5). Эта задача сводится к нахождению следующего интеграла:
 (2.19)
(2.19)
Пусть эта зависимость представлена графически (рис.2.6), тогда искомая работа определяется на графике площадью заштрихованной фигуры.
Заметим, что в отличие от второго закона Ньютона в выражениях (2.22) и (2.23) под F совсем не обязательно понимать равнодействующую всех сил, это может быть одна сила или равнодействующая нескольких сил.
Работа может быть положительной или отрицательной. Знак элементарной работы зависит от значения соsα. Так, например, из рисунка 2.7 видно, что при перемещении по горизонтальной поверхности тела, на которое действуют силы F, F тр и mg, работа силы F положительна (α > 0), работа силы трения F тр отрицательна (α = 180°), а работа силы тяжести mg равна нулю (α = 90°). Так как тангенциальная составляющая силы F t = F соs α, то элементарная работа вычисляется как произведение F t на модуль элементарного перемещения dS:
dA = F t dS (2.20)
Таким образом, работу совершает лишь тангенциальная составляющая силы, нормальная составляющая силы (α = 90°) работы не совершает.
Быстроту совершения работы характеризуют величиной, называемой мощностью.
Мощностью называется скалярная физическая величина, равная отношению работы ко времени, за которое она совер шается:
 (2.21)
(2.21)
Учитывая (2.22), получаем
 (2.22)
(2.22)
или N = Fυcosα (2.23) Мощность равна скалярному произведению векторов силы и скорости.
Из
полученной формулы видно, что при
постоянной мощности двигателя сила
тяги больше тогда, когда скорость
движения меньше
 .
Именно поэтому водитель автомобиля при
подъёме в гору, когда нужна наибольшая
сила тяги, переключает двигатель на
малую скорость.
.
Именно поэтому водитель автомобиля при
подъёме в гору, когда нужна наибольшая
сила тяги, переключает двигатель на
малую скорость.
